شبیه سازی کنترل مستقیم گشتاور در ماشین القایی تکفاز matlab
اعتبار مورد نیاز : 1 + فایل شبیه سازی دارد
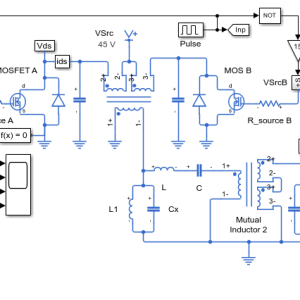
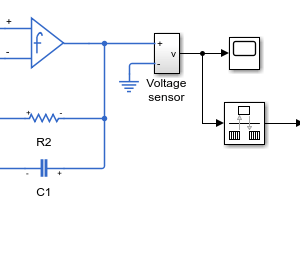
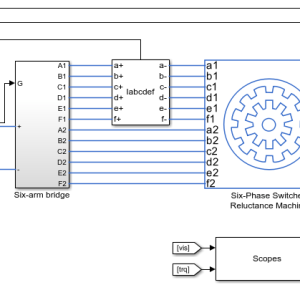
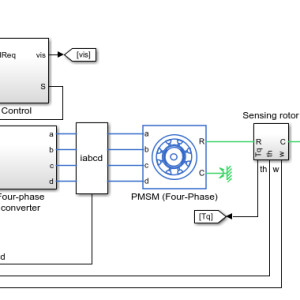
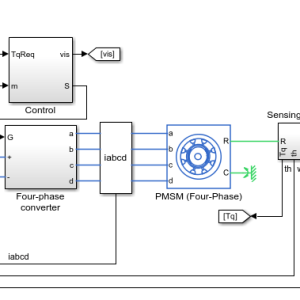
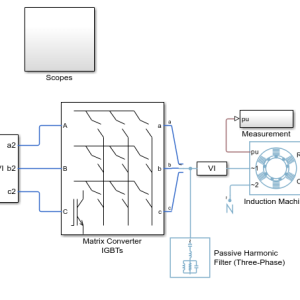
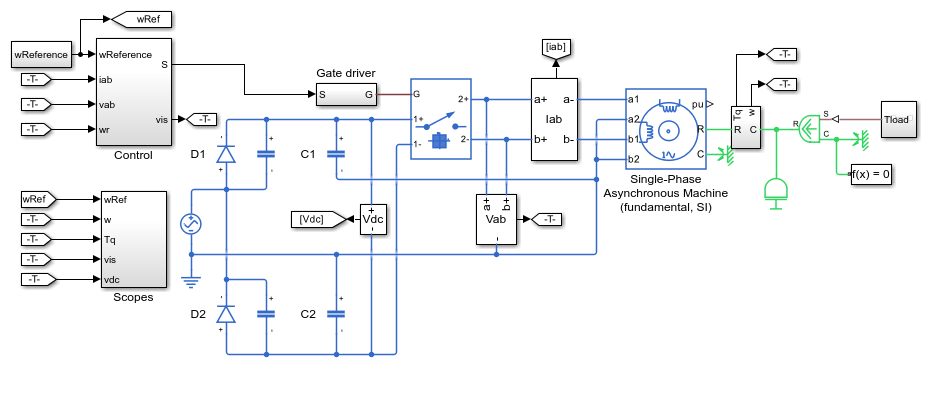
این مثال نشان میدهد که چگونه سرعت روتور را در یک درایو الکتریکی مبتنی بر ماشین القایی تکفاز (ASM) با استفاده از کنترل مستقیم گشتاور کنترل کنیم. یک منبع گشتاور ایدهآل بار را فراهم میکند. زیرسامانه کنترل از ساختار کنترل آبشاری استفاده میکند. یک حلقه کنترلی سرعت بر پایه PI در بخش خارجی، مقادیر مرجع گشتاور و شار را برای الگوریتم کنترل مستقیم گشتاور در حلقه داخلی فراهم میکند. ماشین القایی تکفاز از طریق یک پل H تغذیه میشود. زیرسامانه Scopes شامل اسکوپهایی است که به شما امکان مشاهده نتایج شبیهسازی را میدهد.
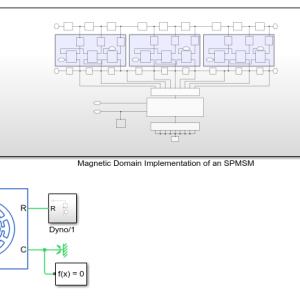
مدل
نتایج شبیهسازی از Simscape Logging
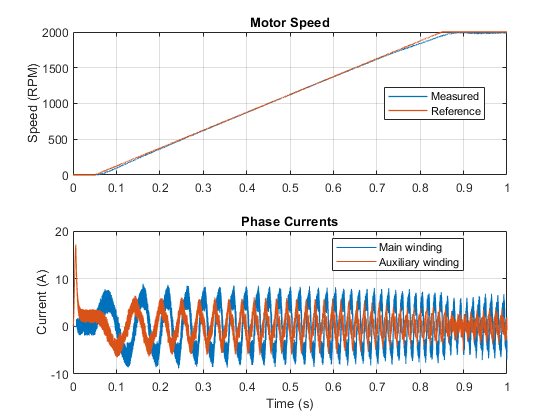
نمودار زیر سرعت درخواستی و اندازهگیریشده برای آزمایش، همچنین جریانهای استاتور در درایو الکتریکی را نشان میدهد.
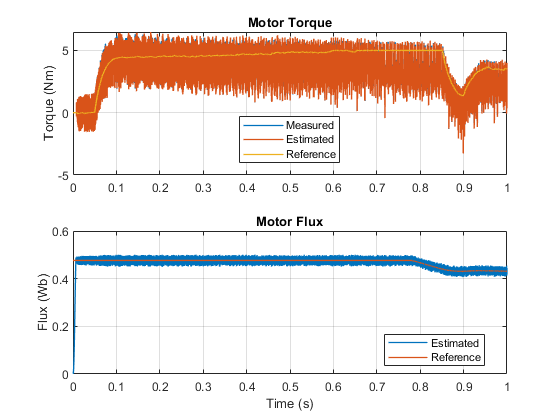
نمودار زیر گشتاور درخواستی و اندازهگیریشده برای آزمایش، همچنین شار درخواستی و برآوردشده در درایو الکتریکی را نشان میدهد.
نتایج شبیهسازی در زمان واقعی
این مثال روی یک ماشین هدف عملکردی Speedgoat real-time با پردازنده چندهستهای Intel® i7 با فرکانس ۳.۵ گیگاهرتز آزمایش شده است. این مدل میتواند در زمان واقعی با اندازه گام ۲۰ میکروثانیه اجرا شود.