شبیه سازی کنترل موقعیت موتور BLDC با مدل حرارتی matlab
اعتبار مورد نیاز : 1 + فایل شبیه سازی دارد
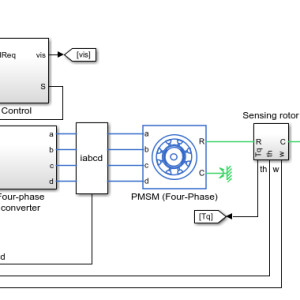
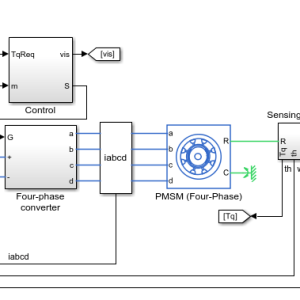
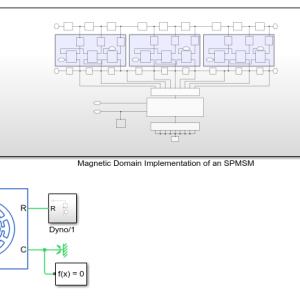
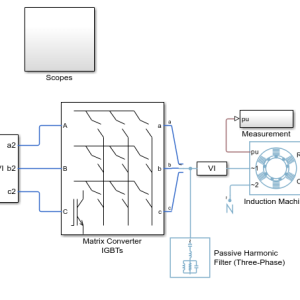
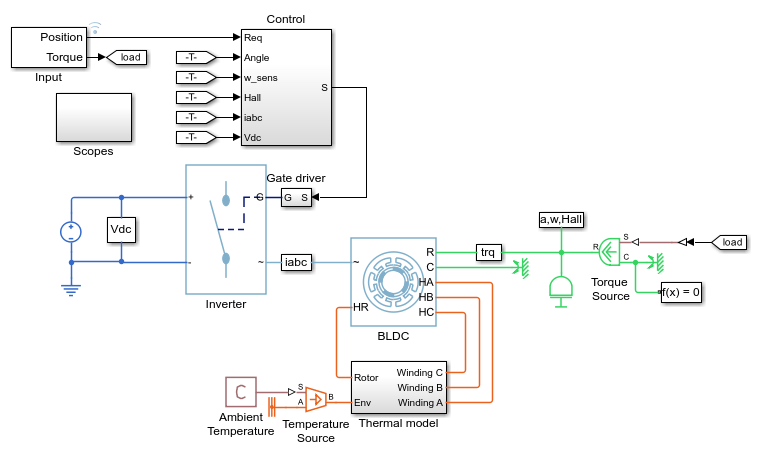
این مثال نشان میدهد که چگونه زاویه روتور را در یک درایو الکتریکی مبتنی بر موتور DC بدون جاروبک (BLDC) کنترل کنیم. موتور BLDC شامل یک مدل حرارتی و تلفات آهن تجربی است. یک منبع گشتاور ایدهآل بار را فراهم میکند. زیرسامانه کنترل از ساختار کنترل آبشاری مبتنی بر PI استفاده میکند که شامل سه حلقه کنترلی است: یک حلقه کنترل موقعیت بیرونی، یک حلقه کنترل سرعت، و یک حلقه کنترل جریان داخلی. موتور BLDC توسط یک اینورتر سهفاز کنترلشده تغذیه میشود. سیگنالهای گیت برای اینورتر از سیگنالهای هال بهدست میآیند. شبیهسازی از مراجع پلهای استفاده میکند. دمای اولیه سیمپیچهای استاتور و روتور ۲۵ درجه سلسیوس و دمای محیط ۲۷ درجه سلسیوس تنظیم شده است. زیرسامانه Scopes شامل اسکوپهایی است که امکان مشاهده نتایج شبیهسازی را فراهم میکنند.
مدل
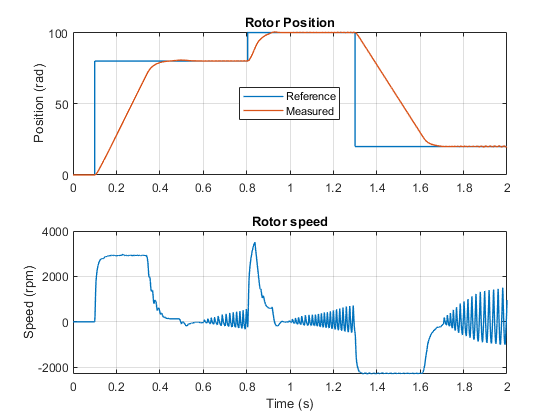
نتایج شبیهسازی از ثبت دادههای Simscape
نمودار زیر زاویه درخواستی و اندازهگیریشده برای آزمایش و سرعت روتور در درایو الکتریکی را نشان میدهد.
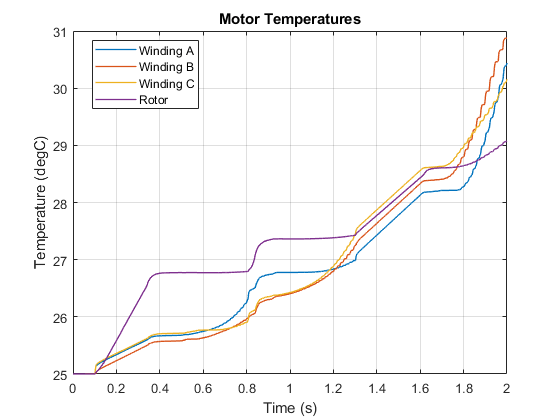
نمودار زیر دماهای سیمپیچ و روتور موتور را نشان میدهد.