شبیه سازی کنترل گشتاور PMSM چهار فاز matlab
اعتبار مورد نیاز : 1 + فایل شبیه سازی دارد
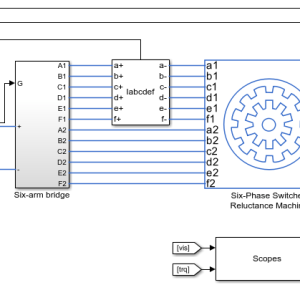
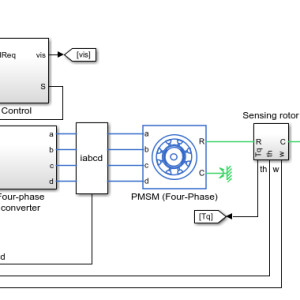
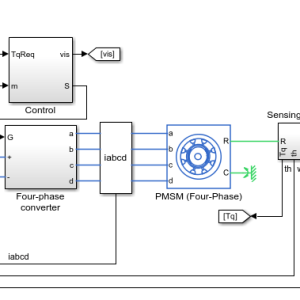
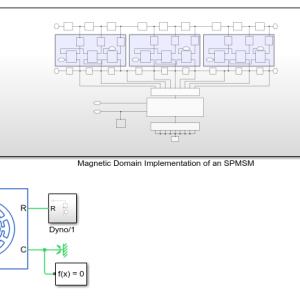
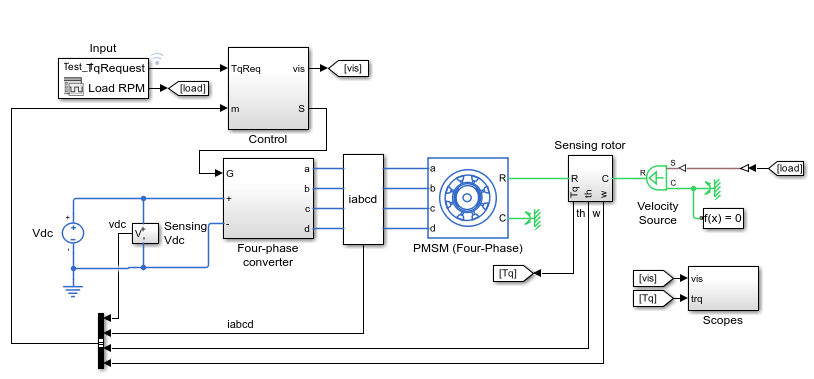
این مثال نشان میدهد که چگونه میتوان گشتاور را در یک سیستم محرکه الکتریکی کششی مبتنی بر ماشین سنکرون مغناطیس دائم (PMSM) چهار فاز کنترل کرد. یک منبع ولتاژ DC، PMSM را از طریق یک مبدل چهار فاز کنترلشده تغذیه میکند. این PMSM با توجه به بار، در هر دو حالت موتوری و ژنراتوری کار میکند. یک منبع سرعت زاویهای ایدهآل، بار را فراهم میکند. زیرسیستم کنترل از رویکرد حلقه باز برای کنترل گشتاور PMSM و رویکرد حلقه بسته برای کنترل جریان استفاده میکند. در هر نمونهبرداری، درخواست گشتاور به یک مرجع جریان محور q مربوطه تبدیل میشود. کنترل جریان بر اساس کنترلکننده PI انجام میشود. شبیهسازی شامل چند مرحله گشتاور در هر دو حالت موتوری و ژنراتوری است. زیرسیستم Scopes شامل اسکوپهایی است که امکان مشاهده نتایج شبیهسازی را فراهم میکنند.
مدل
نتایج شبیهسازی از Simscape Logging
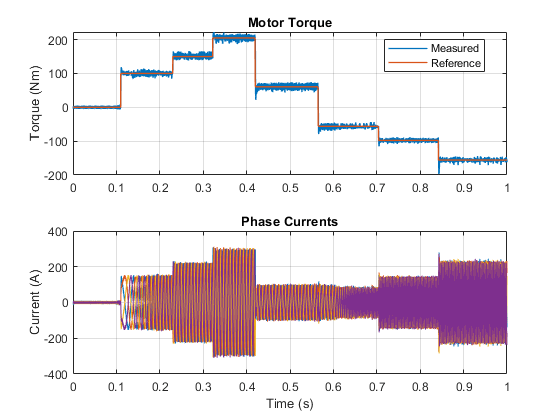
نمودار زیر، گشتاور درخواستی و اندازهگیریشده را برای آزمایش نشان میدهد، همچنین جریانهای فازی در محرکه الکتریکی نیز نمایش داده شدهاند.