توضیحات
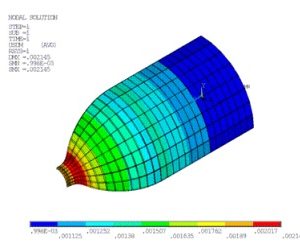
روتوردینامیک نقش مهمی در شناسایی سرعت های بحرانی و در نهایت طراحی سازه های چرخشی ایفا می کند که ارتعاشات بسیار بالا را تحمل می کنند. این مثال کاربرد روشهای تحلیل روتوردینامیک را با استفاده از مدل روتور نلسون-وو نشان می دهد .یک نمایش متقارن محوری دو بعدی از مدل جامد سه بعدی برای انجام یک تحلیل روتوردینامیکی استفاده می شود. نتایج حاصل از تحلیل مدل متقارن محوری دو بعدی با نتایج مدل جامد سه بعدی کامل مقایسه می شود.
ماشینهای دوار مانند توربینهای بخار یا گاز، توربو ژنراتورها، موتورهای احتراق داخلی، موتورها و درایوهای دیسکی میتوانند اثرات اینرسی ایجاد کنند که میتوان آن را برای بهبود طراحی و کاهش احتمال خرابی تجزیه و تحلیل کرد. روندهای فعلی در طراحی تجهیزات دوار بر افزایش سرعت تمرکز دارد که باعث افزایش مشکلات عملیاتی ناشی از ارتعاش می شود. در سرعت های چرخشی بالاتر، اثرات اینرسی قطعات در حال چرخش باید به طور مداوم بررسی شود تا رفتار روتور به طور دقیق پیش بینی شود.
اثرات اینرسی در سازه های دوار معمولاً ناشی از گشتاور ژیروسکوپی است که توسط حرکات دقیق روتور ارتعاشی در حین چرخش ایجاد می شود. با افزایش سرعت اسپین، گشتاور ژیروسکوپی که روی روتور اثر میکند، حیاتی میشود. در نظر نگرفتن اثرات اینرسی در سطح طراحی می تواند منجر به آسیب یاتاقان و سازه پشتیبانی شود. همچنین در نظر گرفتن سختی یاتاقان، انعطاف پذیری ساختار پشتیبانی و ویژگی های میرایی برای درک پایداری روتور ارتعاشی مهم است.
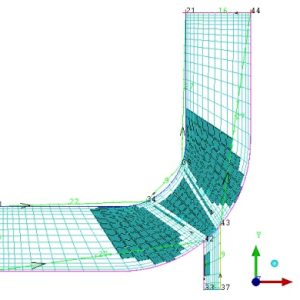
در بخشهای بعدی، جزئیات مدلسازی و روشهای تحلیل برای یک سازه دوار به تفصیل بیان میشود. به طور کلی، یک مدل سه بعدی که مستقیماً از CAD در دسترس است می تواند برای تجزیه و تحلیل استفاده شود. با این حال، مدل های سه بعدی منجر به تعداد زیادی مدل گره ها و عناصر می شوند. این مثال نشان میدهد که چگونه میتوان یک مدل دو بعدی صفحه را از مدل سه بعدی استخراج کرد، که میتوان آن را با استفاده از گرهها و عناصر بسیار کمتری تحلیل کرد. سهولت استفاده، دقت و عملکرد آنالیزهای مدل دوبعدی و سه بعدی مقایسه شده است
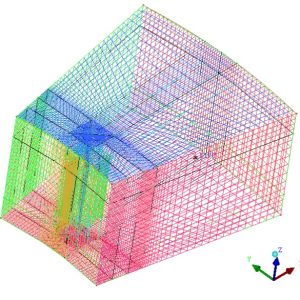
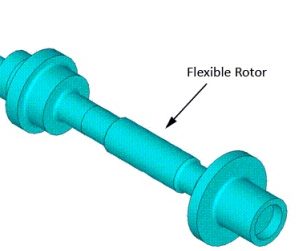
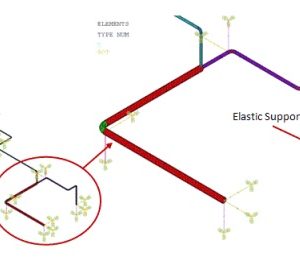
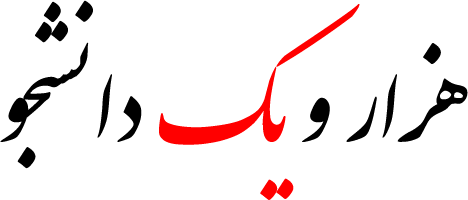
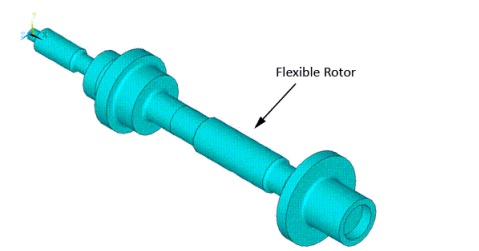
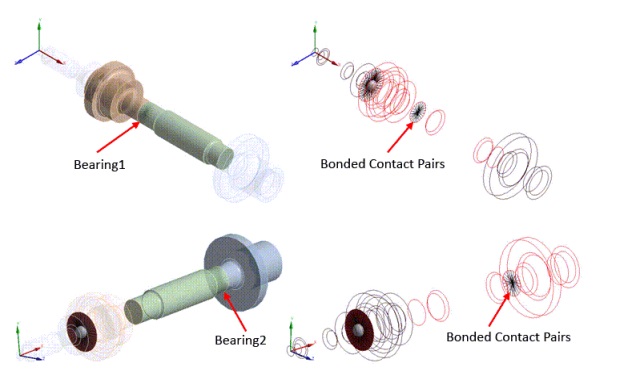
مدل مسئله یک مدل هندسی سه بعدی از روتور نلسون وو است که در شکل زیر نشان داده شده است. این مدل از یک روتور انعطاف پذیر با یک دیسک صلب تشکیل شده است که توسط دو یاتاقان ارتوتروپ پشتیبانی می شود. جزئیات مدل سازی مدل اصلی را می توان در مدل مرجع یافت.