شبیه سازی میکروکنترلر با اتصالات GPIO، ADC و DAC در نرم افزار Matlab
اعتبار مورد نیاز : 1
+ فایل شبیه سازی دارد
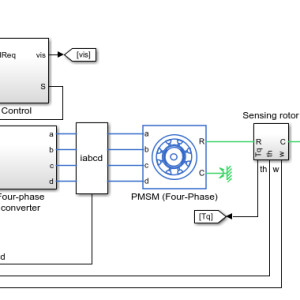
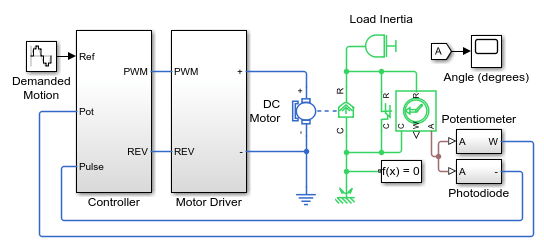
این مثال نحوه مدلسازی ارتباط بین واحد میکروکنترلر (MCU) و یک سیستم فیزیکی را نشان میدهد. در اینجا، اتصالات GPIO، ADC و DAC میکروکنترلر برای کنترل یک موتور DC و بار متصل به آن با حرکت زاویهای محدود استفاده میشود. اندازهگیری زاویه بار از طریق یک سنسور پتانسیومتر انجام میشود. این اندازهگیری ابتدا با تغییر تدریجی موقعیت روتور تا زمانی که فوتودیود پالس نوری زاویه صفر را از LED شناسایی کند، کالیبره میشود. پس از کالیبراسیون، میکروکنترلر یک سیگنال سینوسی با فرکانس ۰.۱ هرتز و دامنه ۴۵ درجه ارسال میکند.
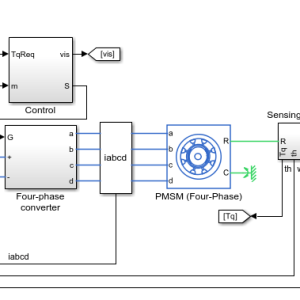
مدل:
زیرسیستم کنترلر
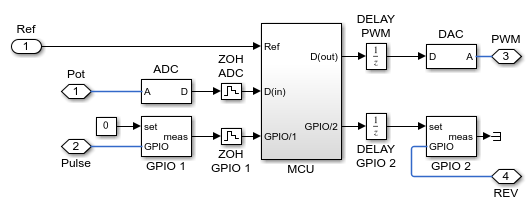
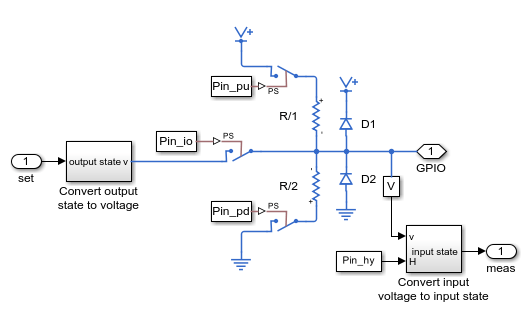
زیرسیستم GPIO 1
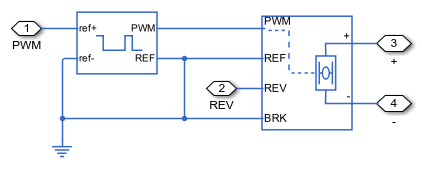
زیرسیستم درایور موتور
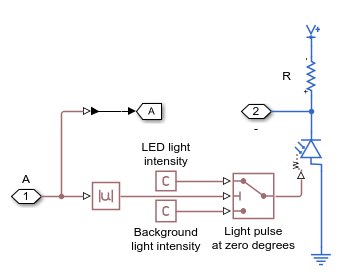
زیرسیستم فوتودیود
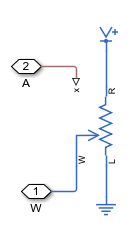
زیرسیستم پتانسیومتر
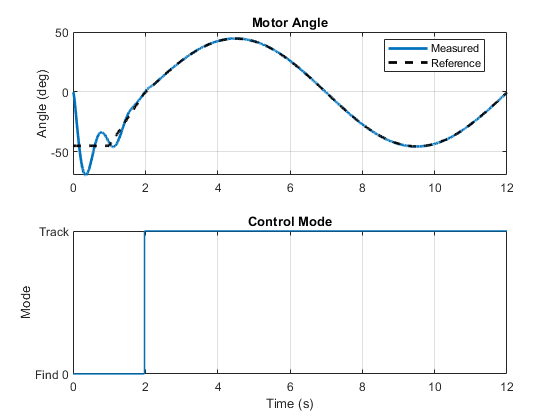
نتایج شبیهسازی از لاگگیری Simscape
نمودار زیر عملکرد سیستم کنترل موتور را نشان میدهد. در ابتدای شبیهسازی، کنترلر موتور را میچرخاند تا موقعیت شناختهشدهای از شافت موتور (۰ درجه) را پیدا کند. پس از آن، کنترلر سیگنال مرجع را دنبال میکند.
نتایج شبیهسازی زمان واقعی
این مثال بر روی یک دستگاه هدف زمان واقعی Speedgoat Performance با پردازنده چند هستهای Intel® i7 با فرکانس ۳.۵ گیگاهرتز تست شده است. این مدل قادر است در زمان واقعی با اندازه گام ۳۰۰ میکروثانیه اجرا شود.